
Alimentation électrique de la plateforme et des moteurs

L'autonomie électrique du ROV est une question importante. Jusqu'à présent, étant en phase de réflexion, j'ai utilisé une alimentation séparée pour le plate-forme (un powerbank délivrant 5V) et une alimentation pour les moteurs (batterie NiMH à 7,2V). L'utilisation de deux batteries est très intéressante car cela permet d'avoir globalement plus d'autonomie, mais cela a des répercussions en termes de poids, de coût et d'encombrement. De plus, l'alimentation à 7,2V pour les moteurs n'est pas suffisante.
Carte de gestion de l'alimentation
Après une recherche, j'ai trouvé une carte permettant d'assurer l'alimentation d'une Raspberry Pi avec une tension entre 6 et 61Vcc et fournit la fonctionnalité UPS: la StromPi 2. Cette carte permet d'adapter la puissance délivrée aux plages souhaitées pour alimenter une Raspberry Pi. Elle permet aussi de délivrer une tension de puissance si nécessaire (alimentation en 5V jusqu'à 3A via USB normal ou micro).
Un des avantages de cette carte est de permettre une alimentation principale et une secondaire de secours. Il y a une communication sur le port GPIO 21 pour connaître le type d'alimentation et être informé du basculement de l'alimentation principale à l'alimentation de secours. Comme dans notre cas, le but est justement de ne pas avoir deux alimentations, j'ai ouvert le cavalier T-Pin pour qu'aucune information ne soit envoyée sur le port GPIO 21 qui est utilisé pour contrôler un des moteurs en PWM. La documentation complète en français décrit 'ensemble des paramétrages qui peuvent être réalisés à l'aide des cavaliers sur la carte. Attention toutefois à bien vérifier le nom des paramètres en face des pins car il y a des différences entre la documentation et la carte que j'ai.
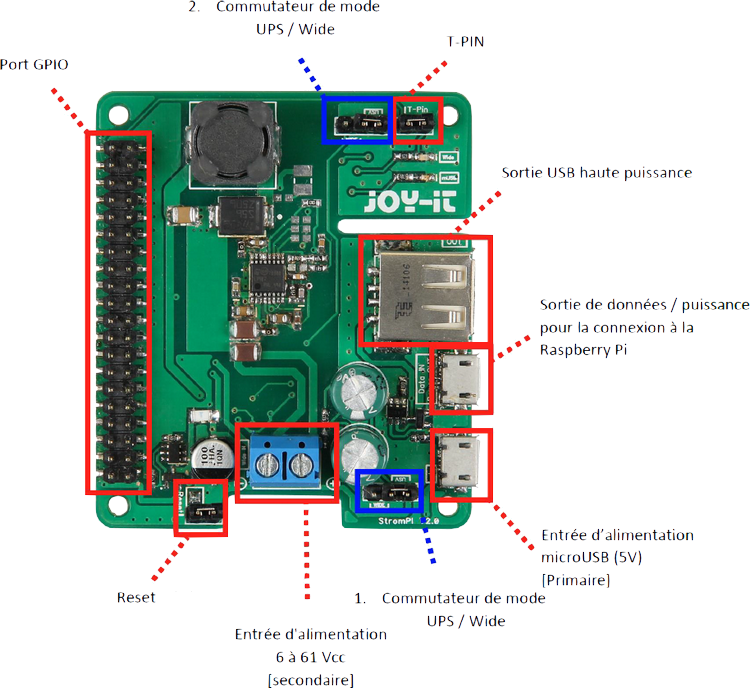
Voici une description de la position des cavaliers:
- Commutateur de mode: WIDE. Attention il y a deux cavaliers pour le mode (un en haut de la carte et un en bas). A priori les deux doivent être sur la même position.
- T-Pin: ouvert (ceci évite d'envoyer l'information de basculement d'alimentation sur le port GPIO 21 qui est déjà utilisé dans notre cas)/
- Reset: fermé (permet de réinitialiser la carte s'il y a un problème avec l'alimentation principale. Comme nous ne disposons que d'une alimentation, cela n'a pas d'intérêt).
Accumulteur / Batterie
Dans un premier temps, je n'ai pas à acheter de batterie car j'ai pu utiliser des batteries dont je disposais (powerbank pour téléphone délivrant du 5V et batterie NiMh fournissant du 7,4V pour les moteurs). Mais il va falloir un accumulateur permettant de délivrer une alimentation en 12V. En effet, les moteurs, et sûrement à terme l'éclairage vont nécessiter un voltage plus élevé que 5V-1.5A.
J'ai tout d'abord tenté d'utiliser un accumulateur Tekkeon myPowerALL MP3450i (que j'avais en stock), mais ce type d'accumulateur n'est pas adapté à la forte demande des moteurs. Quand on alimente la carte et les moteurs, l'intensité délivrée n'est pas suffisante et créé une coupure électrique, redémarrant la plateforme. Donc même si cela semble séduisant, ne partez par sur une solution de ce type.
Choix de la batterie
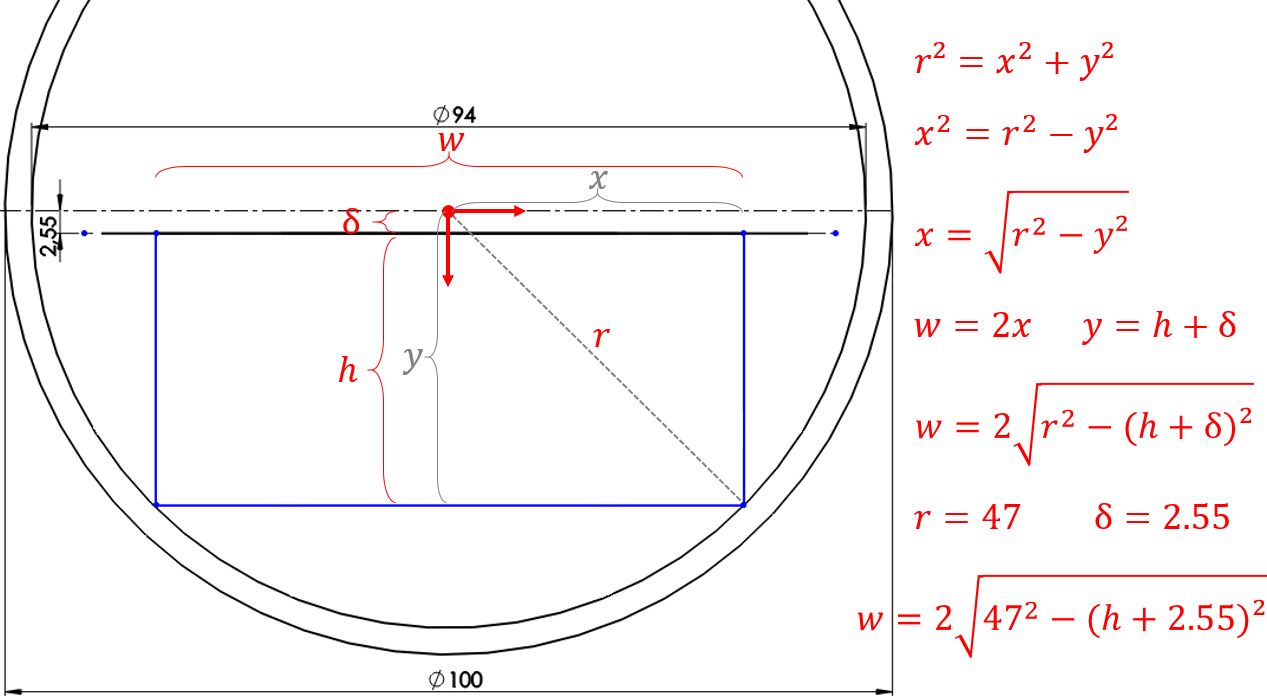
Pour pouvoir délivrer les 5V à 12V avec une intensité (ampérage) adaptée aux moteurs, il est nécessaire de se tourner vers les batteries utilisées dans le cadre du modélisme. Si nous avons assez peu de contraintes de poids à cause de la taille de l'enveloppe, nous avons par contre des contraintes quant aux dimensions (et donc au volume) pour que la batterie puisse se glisser dans l'enveloppe. J'ai donc réalisé un petite schéma pour calculer le rapport entre la largeur et la hauteur pour que la batterie se loge dans l'espace actuellement disponible étant donné la conception actuelle.
Le schéma ci-dessous illustre la largeur maximale de l'accumulateur en fonction de sa hauteur. Celle-ci est augmentée de 2,55mm par rapport à l'axe du cylindre car c'est la hauteur sous le plateau permettant de positionner la plateforme dans la partie haute. Les formules permettent de déterminer la largeur maximale que pourra avoir la batterie pour pouvoir se loger dans l'espace prévu.
Afin de déterminer la batterie à commander, je me suis rendu sur le site d'HobbyKing et plus précisement sur l'outil de sélection de batterie en fonction de critères. J'en ai extrait un tableau des principales caractéristiques et ai ainsi construit la feuille de calcul ci-dessous pour choisir le meilleur modèle en fonction des contraintes.
![]() Fiche excel pour le calcul des dimensions maximum des batteries
Fiche excel pour le calcul des dimensions maximum des batteries
J'ai donc commandé le modèle: ZIPPY Flightmax 8000mAh 3S1P 30C Lipo Pack qui en plus était en promotion au moment de ma commande. Je suis en attente de livraison pour les tests.

