Caisson étanche V1 pour mise à l'eau

Un des problèmes majeurs dans le cadre de notre projet est bien évidemment la réalisation d'un caisson étanche. Vous allez me dire, et ce n'est que maintenant que l'on aborde le problème... Après beaucoup d'autres expérimentations. Je n'ai pas négligé ce point, c'est juste que j'ai pris beaucoup de temps pour trouver la/les meilleurs solutions ou plus exactement, les meilleurs compromis.
Le but est bien évidemment de disposer d'un caisson étanche qui permette d'y glisser l'ensemble des matériels, tout en assurant l'étanchéité du tout. Il serait vraiment dommage de tout griller lors du premier test avec la plate-forme embarquée. La solution proposée par OpenRov est de créer soit même un caisson étanche avec des morceaux de plexiglas. Cette solution présente l'avantage d'apporter de la transparence, mais le plexiglas est tout de même une solution un peu fragile comme matériaux pour construire l'intégralité du ROV. J'ai donc regardé par mal d'autres solutions, mais toutes présentent de gros inconvénients. Par exemple, la solution à base de tube PVC, comme quand j'ai proposé de construire un phare pour la plongée, présente un énorme inconvénient: la dissipation de la chaleur (ce qui m'a conduit à arrêter le projet).
Avoir un caisson en plexiglas est intéressant pour assurer la meilleure visibilité possible (positionnement de la caméra comme on le souhaite et pas obligatoirement en bout de tube). Par contre, disposer d'un corps en aluminium assurera une meilleure solidité, résistance et longévité à votre ROV. Mais comment disposer d'un tube en aluminium étanche?... Dans mon cas, un adhérent du club avait un vieux phare dont il ne se servait plus. Il en a fait dont au club qui me l'a passé pour en faire un phare avec une tête de LEDs et ainsi résoudre mon problème de dissipation thermique dû à l'utilisation de PVC (voir projet Lampe/Phare de plongée). Mais mon but était de faire un phare compact. Donc c'était peu adapté. Or c'est parfait pour le projet de ROV. Donc je me suis attelé à voir comment transformer ce corps de phare en un caisson étanche pour le ROV afin de réaliser les premiers tests.
Réutilisation d'un corps de phare
Le phare que j'ai a ma disposition est un SubaTec S180. Rien qu'en le regardant, on voit que c'est du solide. J'ai commencé par retirer du corps de phare l'ensemble des composants intérieurs (batteries, plaque d'identification et le câblage).
L'objectif, dans les jours à venir, est de tester l'étanchéité du phare en question (tout d'abord en piscine puis en mer), afin de vérifier que les joints remplissent toujours leur mission. Un entretien du joint torique avec de la graisse silicone.
Quelques adaptations sont à réaliser. Après le test de base d'étanchéité, on supprimera le réflecteur afin de gagner de la place et d'avoir un accès direct à la zone vitrée. Puis viendra le moment de percer ce caisson étanche afin d'assurer le passage de l'ombilic qui permettra de communiquer entre le ROV et la surface.
Passages de câbles
Il reste à voir comment le modifier pour ajouter un (des) passage(s) de câble(s). Plusieurs solutions sont envisageables pour le passage de câbles. A minima, on peut lister les possibilités suivantes:
- Connecteur étanche: il y a une très grande diversité de connecteurs. Mais les connecteurs étanches en profondeurs sont difficiles à trouver et à un prix élevé.
- Presse-étoupe: intéressant pour une protection contre les projections, mais ce n'est pas recommandé pour une immersion profonde (certains sont certifiés pour 10 bars, mais ils sont chers) et dans le cas où le câble à une certaines mobilité. Ces deux paramètres m'ont fait abandonner cette solution.
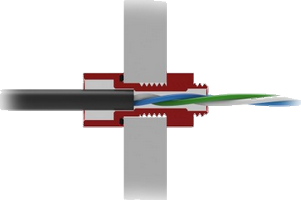
- Pénétrateur: c'est un passage de câble dont l'étanchéité est assurée par un joint torique (sous la tête) et serré à l'enveloppe par un contre écrou. En général le pénétrateur est rempli de résine pour assurer l'étanchéité au niveau du passage de câble (la plupart du temps résine époxy marine).
J'ai donc retenu la solution du pénétrateur que l'on remplira de résine époxy marine. Voici à quoi ressemble un pénétrateur, avec une vue en coupe pour comprendre la manière dont cela fonctionne.

Adaptation du caisson du phare
Il est nécessaire de faire quelques adaptations de l'enveloppe étanche de notre phare. Au menu des modifications à apporter:
- Démonter la poignée du phare
- Supprimer le réflecteur
- Percer le corps du phare pour insérer un pénétrateur
Première étape: démontage de la poignée, étape qui est censée être très simple car il y a une visse six pans creux qui fixe la poignée au phare. Rien de bien sorcier... Que néni! Impossible de démonter la visse. Elle a dû rouiller avec le temps... Un petit coup de dégrippant devrait faire l'affaire... Et bien non, toujours impossible. En fait la visse était collée pour éviter qu'elle ne se desserre. Il a fallu frapper au marteau sur la poignée pour arriver avec beaucoup de force à dévisser la poignée.


Deuxième étape de nos modifications: supprimer le réflecteur optique qui servait à concentrer la lumière de l'ampoule halogène du phare. Nous avons besoin d'un accès direct au verre pour que la caméra puisse filmer à l'extérieur du caisson. Utilisation d'une simple scie à métaux (le réflecteur semblant être en aluminium.


Troisième étape cruciale: réaliser un passage de câble étanche. Nous allons bien entendu utiliser le pénétrateur que nous avons décrit plus haut qui permettra d'assurer l'étanchéité. J'en ai commandé 3: 1 plein pour pouvoir faire des tests et éventuellement reboucher un trou, un pour un câble de 6mm de diamètre et un pour un câble de 8mm de diamètre. L'avantage est que le trou nécessaire pour assurer le passage du pénétrateur et de même diamètre. Ne disposant pas encore du bon câble, nous allons installer le pénétrateur plein. Après avoir pointé le centre du trou à 15mm du bord du cylindre, une pré-trou est réalisé avec une mèche de diamètre 3mm puis le trou est agrandi à un diamètre de 10mm. Mais ce trou n'est pas suffisant pour insérer le pénétrateur. Donc une mèche de 10,5mm est utilisée pour réaliser le trou final.



On y installe alors le pénétrateur plein après avoir graissé le joint torique permettant d'assurer l'étanchéité à la graisse au silicone. Il ne reste alors plus qu'à assembler le tout et à aller dans la piscine pour faire un simple test (et oui, en vacances, on est loin de la mer, alors on test avec ce dont on dispose).
Après un test de 30 minutes à 2m de profondeur, pas une trace d'humidité à l'intérieur du tube, donc il semble a minima que cela soit étanche. Bon OK, on ne "prouve" rien avec ce petit test car la pression n'est que 1,2 bars. Il faudra bien sûr réaliser un test un test par une plus grande profondeur en mer.
Passons maintenant au pénétrateur permettant le passage du câble de communication. Sur la photo ci-dessous, il y a trois pénétrateurs, l'un permettant le passage d'un câble de 8mm (le pénétrateur noir), un pénétrateur non percé (le pénétrateur rouge, du milieu sur la photo, que nous avons utilisé précédemment pour faire un premier test) et enfin un pénétrateur permettant le passage d'un câble de 6mm (celui de droite et qui correspond au type de câble que nous utilisons).


Pour rendre étanche un pénétrateur, il faut faire passer le câble dans le pénérateur (en prenant le diamètre le plus juste) et remplir l'espace libre restant avec de la résine époxy marine (achetée à Cabesto). Il faut remplir la partie intérieure (photo jointe) ainsi que la partie extérieure. Attention à l'utilisation de la résine époxy. Il est très important de bien respecter les proportions entre la base et le durcisseur (attention à la proportion en poids ou en volume qui n'est pas obligatoirement la même). Il est aussi important de respecter la température de séchage (entre 20 et 25°C) ainsi qu'une durée d'au moins 24h dans mon cas. Si tout cela est bien fait, la résine ne se rétracte quasiment pas et devient très très dure. La forme du pénétrateur devrait permettre d'assurer l'étanchéité.
Premier test en piscine
Après 48h de séchage (24h pour chacun des deux côtés du pénétrateur à combler), nous sommes prêts pour un premier test avec la plate-forme en piscine. J'ai utilisé un autre projet de boîtier pour insérer la plate-forme dans le caisson sans risquer un problème électrique au contact de connecteurs sur le corps en aluminium. Il sera bien sûr nécessaire de faire un support adapté à ce caisson. Mais pour le moment, il est temps de faire un premier test dans l'eau et surtout sous l'eau même si la profondeur est très faible.

Aller, on met à l'eau et on fait la première vidéo sous l'eau... C'est parti, ça marche très bien et ça ne prend pas l'eau (enfin à 2m de profondeur, heureusement). Voici la première vidéo réalisée. Bien sûr, je n'ai pas tout embarqué dans le caisson, mais seulement le minimum pour faire un test: la caméra et la centrale inertielle pour avoir l'horizon artificiel. Vous verrez sur la vidéo que l'on voit très bien le hublot circulaire du caisson. C'est avec la caméra grand angle car celle-ci n'est pas placée assez près de la vitre. Tout ceci sera amélioré avec le dessin d'un support pour la plate-forme dans le caisson.
Je tiens à remercier ici tout particulièrement:
- Mon beau-père Daniel pour le coup de main durant cet été, entre autre pour réaliser les trous dans le caisson à l'aide du matériel professionnel dont il dispose dans son atelier.
- Mon fiston avec qui j'ai eu de longues discussions sur le ROV et qui n'a pas hésité à se mouiller pour faire le test en piscine. Je sais que ce projet n'avance pas assez vite à son goût, mais grâce à lui, nous avons pu faire un petit pas suppémentaire vers une solution.
Cette première expérimentation, même si elle est bien modeste, permet de retrouver le moral et de voir que cela avance un peu. Il reste encore de nombreux problèmes à résoudre et le diable se cache dans les détails, mais on peut poursuivre l'aventure!
Aménagement du caisson étanche pour y loger tout le matériel
Comme vous avez pu le voir sur la vidéo, pour le premier test, la plate-forme a été installée de manière ad-hoc à l'intérieur du caisson mais avec quelques précautions pour éviter tout court-circuit. Il est maintenant temps de réaliser une structure qui se glissera dans le caisson étanche et permettra de d'installer tout le matériel nécessaire et de procéder aux différents tests nécessaires.
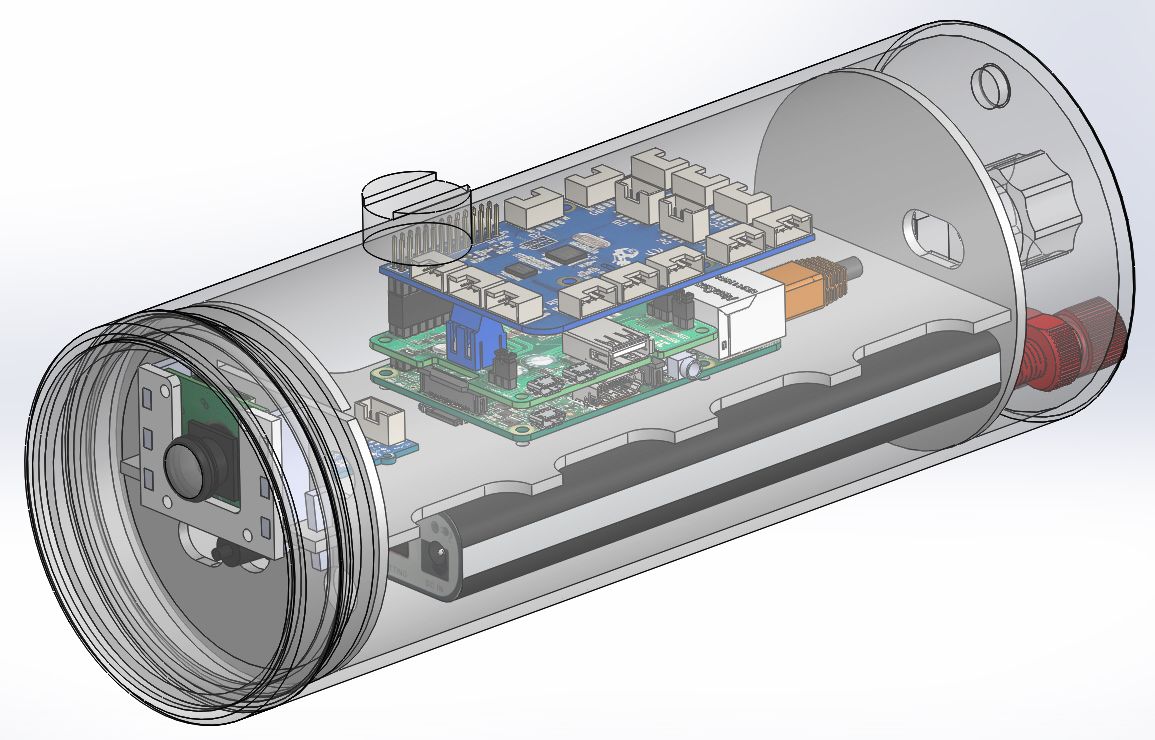
Je me suis donc lancé dans la modélisation des différentes pièces: le caisson étanche (phare SubaTec S180, avec la partie caisson et la partie optique devissable), mais aussi la nouvelle batterie utilisée, la caméra grand angle et toutes les pièces pour réaliser le structure du berceau qui viendra prendre place dans le caisson. Le caisson a beau avoir l'air grand, c'est très vite rempli en fait... Quand on met la batterie, cela occupe déjà par mal de place et y loger le reste des équipements minimaux (caméra, centrale inertielle, Raspberry Pi, GrovePi et StromPi, plus la câblage) est déjà un petit challenge en soit. J'ai réalisé la modélisation des différentes pièces et l'assemblage sous SolidWorks. Ceci devrait permettre de me rendre au FabLab prochaiement pour réaliser la découpe de la stucture et y fixer l'ensemble des matériels.
Vous trouverez ci-dessous la modélisation de l'ensemble. Il y a pas mal d'optimisations encore à réaliser (y compris et surtout pour y loger les ESCs, l'éclairage et le reste du câblage nécessaire), mais pour une première approche sans la partie motorisation, cela devrait permettre de réaliser des tests sans être trop contraint.