
Comparaison des moyens de communication entre le ROV et la surface

Comme nous n'envisageons pas d'avoir un ROV autonome, il est nécessaire de réaliser une communication entre le ROV et la surface pour le téléguider. De nombreuses solutions sont envisageables, mais toutes présentent des avantages et des inconvénients. A partir des données réalisées dans le projet OpenRov (document "Tether Decision Tree de 2012"), j'ai traduit et complété celui-ci. Vous trouverez le résultat ci-dessous.
Pour une meilleure consultation de ce document, vous pouvez le mettre en plein écran (bouton en bas à droit). Vous cliquerez sur chacune des cases de l'arbre de décision afin de voir les avantages et inconvénients de chacune des méthodes.
Dans cet arbre de décision, on peut mettre de côté deux branches qui montrent plus d'inconvénients que d'avantages: la communication sans-fil et la communication avec 3 fils. De plus, j'ai écarté toutes les solutions basées sur une communication de la vidéo en analogique car il faut disposer d'un moniteur analogique spécifique pour afficher le flux vidéo. Une fois ces grands choix réalisés, il reste donc assez peu de solution:
- une liaison fibre optique (mono ou double brin)
- une liaison via deux fils de cuivre pour faire de l'Ethernet via UDP
- une liaison Ethernet 4 fils (via un câble standard 4 paires de fils)
Nous allons donc étudier de plus près le moyen de mettre en oeuvre une de ces solutions
Ethernet
Deux solutions sont possibles pour une liaison via Ethernet: soit une solution utilisant 1 paire (deux fils), soit une solution utilisant 2 paires (4 fils). Globalement, on peut considérer que la limitation pour une solution par Ethernet est que la limite est de 100m (c'est la garantie constructeur, même si en pratique, on peut aller un peu plus loin). Mais cette limitation n'est que peu contraignante car aller à plus de 100m de profond ou plus loin que 100m du point d'immersion (puissance de l'alimentation, des moteurs, ...). Regardons donc plus en détail les avantages et inconvénients des deux solutions pour Ethernet.
Ethernet sur 2 fils
Avec 2 fils, les avantages sont que le câble sera assez léger (donc proche d'une flottabilité neutre dans l'eau), qu'il y a plusieurs protocoles standards pour communiquer par ce biais. Par contre l'inconvénient majeur est que la bande passante avec une telle solution est limitée à 10Mbps (un peu plus si on créé un déséquilibre dans les communication comme pour ADSL). D'autre part, en termes d'approvisionnement de ce type de câble, les choses se compliquent. Soit il faut construire le câble (ce que je n'envisage pas car cela pose pleins de problèmes, soit acheter celui-ci et donc directement dans une version présentant une flottabilité neutre. Le problème majeur apparaît alors: il y a très peu de fournisseur pour ce type de câble. Voici les prix que j'ai pu trouver pour 100m de câble:
- OpenRov, Neutrally Buoyant Tether: 100m de câble pour 410 US$ (soit à l'heure où j'écris cette page: 350€ sans les frais de port)
- Blue Robotics, Fathom ROV Tether: 100m de câble pour 500 US$ (soit 425€ sans les frais de port)
Ces coûts paraissent clairement prohibitifs pour une solution la moins chère possible. De plus, le peu de fournisseurs pour ce type de produit conduit à écarter cette solution même si c'est celle qui est utilisées par deux des acteurs du marchés les plus proches de la solution visée.
Ethernet sur 4 fils (avec câble standard 4 paires)
L'avantage majeure de cette solution est d'être complètement standard donc très facile à réaliser (aucun adaptateur ou équipement spécifique n'est nécessaire). Il y a de nombreux fournisseurs pour ce type de câbles avec des caractéristiques, qualités et prix différents. L'utilisation d'un câble à 4 paires permet aussi d'envisager une alimentation par POE pour la carte principale (ce qui permettrait donc d'avoir deux sources d'alimentation: une avec la batterie embarquée et une via l'ombilic). De plus, il est possible d'atteindre une bande passant de 100Mb (voir de 1Gb, mais le contrôleur Ethernet de la Raspberry n'est qu'à 100Mbs et atteint en débit réel environ 9MB/sec soit 72Mbs d'après ce test).
Concernant la qualité des câbles, il y a plusieurs catégories et des blindages différents. A partir de la catégorie 5 on peut atteindre des débit de 100Mb/sec. On pourra lui préférer un câble de catégorie 5e permettant d'aller à 1Gb/sec. Prendre un câble de catégorie 6 ou 7 n'est que peu d'intérêt. Il permettra d'avoir un meilleur débit (mais 100Mb sont largement suffisant) et sera a priori plus lourd et coûtera plus cher. Pour le blindage, il existe plusieurs types de blindage:
- UTP (Unshielded Twisted Pair): câble non blindé, non écranté
- FTP (Foiled Twisted Pair): câble écranté avec une feuille d'aluminium
- STP (Shielded Twisted Pair): câble écranté paire par paire
- SFTP (Shielded Foiled Twisted Pair): câble écranté paire par paire et blindé
- SSTP (Shielded and Shielded Twisted Pair): câble blindé paire par paire avec un blindage autour
Le schéma ci-dessous permet d'avoir une meilleure visualisation des différents types de protection.
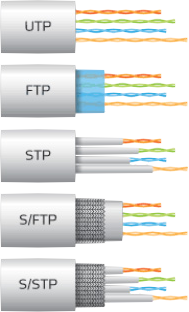
On évitera donc les câbles de type UTP pour leur préférer au moins un câble FTP ou STP. Par contre les câble SFTP et SSTP devraient être plus rigides, donc on évitera de prendre ce type de protection même si a priori, elle est de meilleure qualité.
Seul le poids (donc souci de flottabilité) et la rigidité sont les inconvénients de cette solution.
Fibre optique
L'utilisation d'une fibre optique est séduisante: aucun problème de débit, flottabilité proche du neutre. Par contre, cela nécessite des équipements supplémentaires pour convertir le signal optique en électrique et vice versa. Donc cela implique un coût supplémentaire et un volume pour l'équipement supplémentaire dans le ROV. Le point le plus critique de cette technologie pour notre cas d'utilisation semble être la fragilité. Il faudrait donc réaliser des tests plus avant pour voir si un tel câble serait adapté.
Voici une documentation pour tout savoir sur la fibre optique.
Comme nous l'avons évoqué dans les arguments contre l'utilisation de la fibre, il est nécessaire d'avoir un convertisseur. J'ai pu rapidement trouvé ce type de convertisseur qui présente l'avantage d'être assez peu encombrant et d'avoir un prix raisonnable.
- Convertisseur de média Fast Ethernet WDM MC11CS ou MC112CS ou MC220L de TP-Link que l'on trouve à 33€ environ sur Google Shopping.
Si la solution à base de fibre optique peut être intéressante, elle présente l'inconvénient de nécessiter du matériel supplémentaire ce qui entrainera bien entendu un sur-coût, mais nécessitera aussi une place supplémentaire dans le caisson étanche. Or celle-ci va bien finir par être comptée.
Matériel commandé et tests de qualité
Je m'oriente donc au final vers une solution à base d'Ethernet ce qui présente l'énorme avantage d'être une solution très courante et donc avec un coût raisonnable et une bonne facilité d'approvisionnement.
Je commande le cordon suivant (et à ne surtout pas acquérir, lire la suite pour comprendre):
- Cordon Ethernet RJ45 Cat 5e FTP de 50m à 21,99€
J'ai reçu ce cordon très rapidement par Chronopost. Vous connaissez bien sûr la différence entre un cordon et un câble... A la différence du câble, le cordon est équipé de connecteurs aux deux bouts. Donc un cordon Ethernet possède les prises RJ45 aux extrémités. Ce n'est qu'à moitié un avantage dans notre cas car il faudra couper une des extrémités pour pouvoir passer le câble dans le caisson étanche
Etant équipé de deux connecteurs RJ45, j'ai donc très facilement réalisé un test du cordon pour vérifier sa qualité. Et là, déception totale! Une fois connecté au ROV et à l'ordinateur, les petites LEDs de connectivité ne s'allument même pas... J'ai donc utilisé un testeur Fluke DSP-100 (gentillement prêté) et là, le cordon ne passe pas le test d'atténuation en 10Mbps... En plus en le tortillant un peu, il donne aussi des signes de faiblesse sur le schéma de câblage en donnant un fils d'une des paires comment étant coupé par intermitence. J'ai du mal à m'expliquer cela sur un cordon tout neuf. Après une recherche un peu plus poussée, je découvre que les fils ne sont en cuivre, mais en CCA (Copper Clad Aluminium), soit de l'aluminium plaqué cuivre. Ce type de câble est beaucoup moins cher qu'un câble en cuivre mais présente de nombreux défauts: ne respecte pas les normes, mauvaise flexibilité et rayon de courbure, oxydation et corrosion, pas adapté pour du POE et implique de courtes distances pour éviter une atténuation du signal. Et bingo ! C'est exactement le problème que je rencontre avec "seulement" 50m de câble. Donc un commentaitre sur Amazon pour expliquer que ce câble est une arnaque et retour du colis à l'envoyeur.
Du coup, je repars à la recherche d'un nouveau câble et je commande le suivant, après avoir vérifié ses caractéristiques sur le site du fabriquant (on ne m'y reprendra pas deux fois à acheter un câble Ethernet en CCA):
- Câble Ethernet RJ45 Cat 5e FTP de 50m à 27,74€
Il ne me reste plus qu'à attendre 1 semaine pour le recevoir et faire les tests... Non ce n'est pas possible d'attendre aussi longtemps à cette période propice pour faire avancer le projet. Donc en attendant de recevoir un câble "définitif", je suis parti acheter un cordon de 10m pour faire les premiers tests en piscine. Donc au programme, réaliser le passage de câble à travers le caisson, de manière étanche pour pouvoir faire une première mise à l'eau. Ces informations sont répertoriées sur la page de réalisation du caisson étanche à partir d'un corps de phare de récupération. A noter aussi que j'ai trouvé le site marchand Abix.fr qui propose un guide sur les câbles Ethernet RJ45, très intéressant et très clair sur les différentes caractéristiques. Au moins ce site annonce clairement la couleur sur la qualité des câbles vendus et leurs propriétés. Et je dois avouer que j'ai ai appris certaines choses sur la qualité matérielle des câbles réseau. Je n'ai pas eu recours à ce site pour commander le matériel pour le moment, mais je pense que cela peut être une bonne option étant donné la qualité de celui-ci.
Je reprends l'écriture de cette page car j'ai reçu le câble commandé ci-dessus. Avant de poursuivre avec ce câble, je commence toute de suite à le tester pour savoir s'il est de bonne qualité (contrairement au premier acheté, mais qui m'a été remboursé entre temps). Comme c'est un câble et non un cordon, il faut l'équiper de connecteurs aux deux extrémités. Je n'avais jamais serti des prises RJ45 mâles. Et bien c'est une grosse galère. Il faut faire attention à trouver les connecteurs RJ45 adaptés (en fonction de la taille AWG des fils), mais aussi à prendre des connecteurs avec un guide (ou peigne) pour se faciliter la vie. Je résume ici les problèmes que j'ai rencontré et entre ces caractéristiques et le fait de se faire la main pour sertir ces connecteurs correctement, je dépensé un peu d'argent inutilement. J'ai fini par mettre des prises femelles RJ45 aux deux extrémités et de faire le test en ajoutant deux cordons de qualité. Même si cela ajouter une petite perte liée aux connecteurs ajoutés, je peux vous assurer que c'est beaucoup plus facile et cela prend moins de temps. Ceci étant dit, les tests ont été tout à fait concluants. Malgré ce côté non optimisé utilisant des raccords, le câble passe tous les tests sans problème. Donc ce modèle de câble répond bien aux normes et est adapté à notre projet.
Concernant le câblage d'un connecteur RJ45, il y a plusieurs normes. Comme nous allons connecter directement la plate-forme Raspberry à un PC ou tablette pour le pilotage du ROV, il sera nécessaire de réaliser un câble croisé. Toutefois, de nombreux équipements aujourd'hui se débrouillent très bien avec un simple câble droit en croisant eux-mêmes. Actuellement, j'ai réalisé un câble droit en suivant la norme RJ-45 EIA/TIA 568B.

Mais un des problème majeur de cette solution est le poids du câble dans l'eau. Celui-ci doit être le plus proche possible d'une flottabilité neutre pour ne pas entraîner le ROV vers le fond ou vers la surface. J'ai donc créé une nouvelle page pour exposé les différentes solutions explorées pour résoudre ce problème de flottabilité neutre du câble de communication.

